今天看到Cg中OpenGL的例子“09_vertex_lighting”,例子简洁明了,用生动地展示了基本光照过程。真是爱死Cg了,“The Cg Tutorial"这本书的作者真是太牛了。
light.......
{
float3 P = position.xyz; //current point
float3 N = normal;
// Compute emissive term
float3 emissive = Ke;
// Compute ambient term
float3 ambient = Ka * globalAmbient;
// Compute the diffuse term
float3 L = normalize(lightPosition - P);
float diffuseLight = max(dot(N, L), 0);
float3 diffuse = Kd * lightColor * diffuseLight;
// Compute the specular term
float3 V = normalize(eyePosition - P);
float3 H = normalize(L + V);
float specularLight = pow(max(dot(N, H), 0), shininess);
if (diffuseLight <= 0) specularLight = 0;
float3 specular = Ks * lightColor * specularLight;
color.xyz = emissive + ambient + diffuse + specular;
color.w = 1;
}
几点理解:
1)emissive并不是场景中的光源,它不能照亮其他物体,而自身将会呈现一种单一的颜色;
2)镜面反射取出眼睛和灯光中间向量,与法向求夹角。shininess = 0,光晕最大;shininess增加,呈指数衰减,最后shininess->∽时,只有dot(N, H)=1也就是N和H重合时,采用光斑;
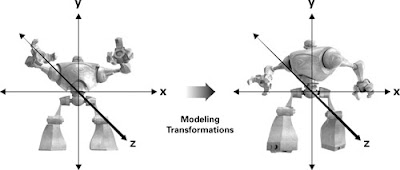
3)在GPU的顶点程序中,传进来的顶点position是未经过任何变换的坐标值,它处于模型坐标系中;而眼睛和光源的位置是在世界坐标系中定义的。所以,GPU计算光照时,必须将眼睛和光源的坐标进行反推到模型坐标系,具体是对modelMatrix求逆,在乘上眼睛和光源的坐标向量;
4)我尝试将modelMatrix传入顶点程序,以将position和normal转入世界坐标系求光照,但是得到错误的结果,思考中......
5)本例子提供了求矩阵逆的函数,弓虽!
/* Invert a row-major (C-style) 4x4 matrix. */
static void invertMatrix(float *out, const float *m)
{
/* Assumes matrices are ROW major. */
#define SWAP_ROWS(a, b) { GLdouble *_tmp = a; (a)=(b); (b)=_tmp; }
#define MAT(m,r,c) (m)[(r)*4+(c)]
double wtmp[4][8];
double m0, m1, m2, m3, s;
double *r0, *r1, *r2, *r3;
r0 = wtmp[0], r1 = wtmp[1], r2 = wtmp[2], r3 = wtmp[3];
r0[0] = MAT(m,0,0), r0[1] = MAT(m,0,1),
r0[2] = MAT(m,0,2), r0[3] = MAT(m,0,3),
r0[4] = 1.0, r0[5] = r0[6] = r0[7] = 0.0,
r1[0] = MAT(m,1,0), r1[1] = MAT(m,1,1),
r1[2] = MAT(m,1,2), r1[3] = MAT(m,1,3),
r1[5] = 1.0, r1[4] = r1[6] = r1[7] = 0.0,
r2[0] = MAT(m,2,0), r2[1] = MAT(m,2,1),
r2[2] = MAT(m,2,2), r2[3] = MAT(m,2,3),
r2[6] = 1.0, r2[4] = r2[5] = r2[7] = 0.0,
r3[0] = MAT(m,3,0), r3[1] = MAT(m,3,1),
r3[2] = MAT(m,3,2), r3[3] = MAT(m,3,3),
r3[7] = 1.0, r3[4] = r3[5] = r3[6] = 0.0;
/* Choose myPivot, or die. */
if (fabs(r3[0])>fabs(r2[0])) SWAP_ROWS(r3, r2);
if (fabs(r2[0])>fabs(r1[0])) SWAP_ROWS(r2, r1);
if (fabs(r1[0])>fabs(r0[0])) SWAP_ROWS(r1, r0);
if (0.0 == r0[0]) {
assert(!"could not invert matrix");
}
/* Eliminate first variable. */
m1 = r1[0]/r0[0]; m2 = r2[0]/r0[0]; m3 = r3[0]/r0[0];
s = r0[1]; r1[1] -= m1 * s; r2[1] -= m2 * s; r3[1] -= m3 * s;
s = r0[2]; r1[2] -= m1 * s; r2[2] -= m2 * s; r3[2] -= m3 * s;
s = r0[3]; r1[3] -= m1 * s; r2[3] -= m2 * s; r3[3] -= m3 * s;
s = r0[4];
if (s != 0.0) { r1[4] -= m1 * s; r2[4] -= m2 * s; r3[4] -= m3 * s; }
s = r0[5];
if (s != 0.0) { r1[5] -= m1 * s; r2[5] -= m2 * s; r3[5] -= m3 * s; }
s = r0[6];
if (s != 0.0) { r1[6] -= m1 * s; r2[6] -= m2 * s; r3[6] -= m3 * s; }
s = r0[7];
if (s != 0.0) { r1[7] -= m1 * s; r2[7] -= m2 * s; r3[7] -= m3 * s; }
/* Choose myPivot, or die. */
if (fabs(r3[1])>fabs(r2[1])) SWAP_ROWS(r3, r2);
if (fabs(r2[1])>fabs(r1[1])) SWAP_ROWS(r2, r1);
if (0.0 == r1[1]) {
assert(!"could not invert matrix");
}
/* Eliminate second variable. */
m2 = r2[1]/r1[1]; m3 = r3[1]/r1[1];
r2[2] -= m2 * r1[2]; r3[2] -= m3 * r1[2];
r2[3] -= m2 * r1[3]; r3[3] -= m3 * r1[3];
s = r1[4]; if (0.0 != s) { r2[4] -= m2 * s; r3[4] -= m3 * s; }
s = r1[5]; if (0.0 != s) { r2[5] -= m2 * s; r3[5] -= m3 * s; }
s = r1[6]; if (0.0 != s) { r2[6] -= m2 * s; r3[6] -= m3 * s; }
s = r1[7]; if (0.0 != s) { r2[7] -= m2 * s; r3[7] -= m3 * s; }
/* Choose myPivot, or die. */
if (fabs(r3[2])>fabs(r2[2])) SWAP_ROWS(r3, r2);
if (0.0 == r2[2]) {
assert(!"could not invert matrix");
}
/* Eliminate third variable. */
m3 = r3[2]/r2[2];
r3[3] -= m3 * r2[3], r3[4] -= m3 * r2[4],
r3[5] -= m3 * r2[5], r3[6] -= m3 * r2[6],
r3[7] -= m3 * r2[7];
/* Last check. */
if (0.0 == r3[3]) {
assert(!"could not invert matrix");
}
s = 1.0/r3[3]; /* Now back substitute row 3. */
r3[4] *= s; r3[5] *= s; r3[6] *= s; r3[7] *= s;
m2 = r2[3]; /* Now back substitute row 2. */
s = 1.0/r2[2];
r2[4] = s * (r2[4] - r3[4] * m2), r2[5] = s * (r2[5] - r3[5] * m2),
r2[6] = s * (r2[6] - r3[6] * m2), r2[7] = s * (r2[7] - r3[7] * m2);
m1 = r1[3];
r1[4] -= r3[4] * m1, r1[5] -= r3[5] * m1,
r1[6] -= r3[6] * m1, r1[7] -= r3[7] * m1;
m0 = r0[3];
r0[4] -= r3[4] * m0, r0[5] -= r3[5] * m0,
r0[6] -= r3[6] * m0, r0[7] -= r3[7] * m0;
m1 = r1[2]; /* Now back substitute row 1. */
s = 1.0/r1[1];
r1[4] = s * (r1[4] - r2[4] * m1), r1[5] = s * (r1[5] - r2[5] * m1),
r1[6] = s * (r1[6] - r2[6] * m1), r1[7] = s * (r1[7] - r2[7] * m1);
m0 = r0[2];
r0[4] -= r2[4] * m0, r0[5] -= r2[5] * m0,
r0[6] -= r2[6] * m0, r0[7] -= r2[7] * m0;
m0 = r0[1]; /* Now back substitute row 0. */
s = 1.0/r0[0];
r0[4] = s * (r0[4] - r1[4] * m0), r0[5] = s * (r0[5] - r1[5] * m0),
r0[6] = s * (r0[6] - r1[6] * m0), r0[7] = s * (r0[7] - r1[7] * m0);
MAT(out,0,0) = r0[4]; MAT(out,0,1) = r0[5],
MAT(out,0,2) = r0[6]; MAT(out,0,3) = r0[7],
MAT(out,1,0) = r1[4]; MAT(out,1,1) = r1[5],
MAT(out,1,2) = r1[6]; MAT(out,1,3) = r1[7],
MAT(out,2,0) = r2[4]; MAT(out,2,1) = r2[5],
MAT(out,2,2) = r2[6]; MAT(out,2,3) = r2[7],
MAT(out,3,0) = r3[4]; MAT(out,3,1) = r3[5],
MAT(out,3,2) = r3[6]; MAT(out,3,3) = r3[7];
#undef MAT
#undef SWAP_ROWS
}




















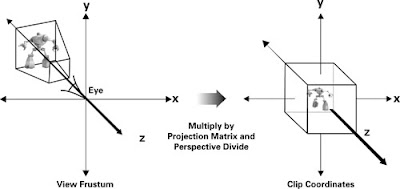
 下面将变换设定在常用的情况上,就是投影平面的中心和xy平面的中心重合,即在上面右图的Z轴上。OpenGL中构建投影矩阵的函数是gluPerspective,其原型是:
下面将变换设定在常用的情况上,就是投影平面的中心和xy平面的中心重合,即在上面右图的Z轴上。OpenGL中构建投影矩阵的函数是gluPerspective,其原型是: 
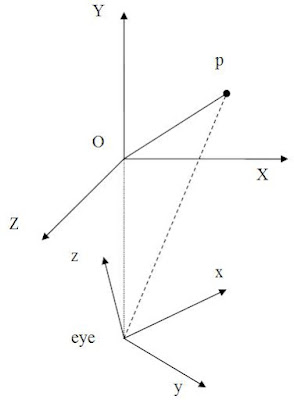
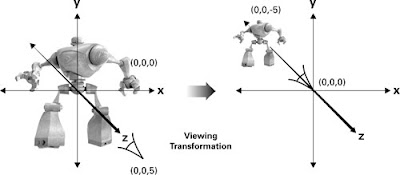 Viewing transfermation: World Space -->Eye Space . It puts eyes at the original.
Viewing transfermation: World Space -->Eye Space . It puts eyes at the original.